
RealMan veröffentlicht RealSource-Datensatz
RealMan Robotics stellt einen offenen, multimodalen Datensatz für reale Robotik- und KI-Anwendungen bereit.
www.realman-robotics.com
RealMan Robotics, ein führender Hertseller von ultraleichten humanoiden Roboterarme, stellt Real Source als Open Source bereit. Dabei handelt es sich um den weltweit ersten hochwertigen und umfassenden multimodalen Datensatz für Robotereinsätze in der realen Welt. Damit stellt das Unternehmen u.a. eine leistungsfähige Grundlage für das Training von KI-gestützten Robotern bereit.
Der Datensatz wurde erhoben und zusammengestellt, weil der Branche umfassende und konsistente Daten dieser Art fehlen. Er bietet wichtige Unterstützung für die Entwicklung der nächsten Generation von Algorithmen zur Steuerung von Robotern in Wissenschaft und Industrie.
Der Datensatz basiert ausschließlich auf zehn Nachbildungen von realen Anwendungsbeispielen Umgebungen im Beijing Humanoid Robot Data Training Center von RealMan. Er zeichnet sich durch eine außergewöhnlich hohe Datenqualität und die weltweit umfassendste multimodale Abdeckung aus.
Homepage des Projektes:: https://realmanrobot.github.io/real_source_dataset
Open Source-Zugang: https://huggingface.co/datasets/RealSourceData/RealSource-World
Hochpräzise Daten aus 10 realistischen Anwendungen
Der Datensatz stammt aus zwei Bereichen des 3.000 m² großen Beijing Humanoid Robot Data Training Centers.

In der Trainingszone findet ein umfangreiches Robotertraining für grundlegende
Manipulationsaufgaben statt. Die Szenariozone („Robot University”) enthält zehn reale Umgebungen für Robotik-Anwendungen, darunter Smart Home & Altenpflege, Alltags-Applikationen, Landwirtschaft, Einzelhandel, Gastronomie und Automobilproduktion.

Roboter führen hier ganz lebensnahe Aufgaben aus dem Haushalt und der Industrie aus, z. B. das Öffnen von Kühlschranktüren, das Zusammenlegen von Wäsche und das Sortieren von Materialien in Produktionslinien.
Diese Arbeiten finden in realitätsnahen, lauten und vielfältigen Umgebungen statt. Somit erfolgt die Datenerfassung außerhalb des „Labor-Gewächshauses“. Das führt zu sehr praxisnahen Datensätzen mit einer sehr guten Verallgemeinerbarkeit über verschiedene Szenarien hinweg.
Wichtige Kennzahlen sind: 100 % Modalitätsvollständigkeit, 78 % Geräuschresistenz, 82,1 %
Glättung. Damit wird ein neuer Maßstab für KI-Datensätze in realen Umgebungen erreicht.

Sechs Vorteile der multimodalen Daten
Der Datensatz deckt die gesamte Prozesskette von Erfassung, Entscheidung und Ausführung ab. Dabei werden u.a. RGB-Bilder, Gelenkwinkel und -geschwindigkeiten, sechsachsige Kräfte,
Endeffektor-Positionen, Handlungsbefehle, Zeitstempel und Kameraparameter erfasst. Einige Besonderheiten im Einzelnen:
- Hardware-basierte zeitlich-räumliche Synchronisation: Alle Sensoren sind auf ein einheitliches physikalisches Koordinatensystem abgestimmt.
- Extrem geringer Frame-Verlust (<0,5 %): Kontinuierliche, zuverlässige Aufzeichnung auch bei hoher Geschwindigkeit.
- Hochpräzise Bewegungssteuerung: Gelenkdaten im Millisekundenbereich für reibungslose, genaue Abläufe.
- Werksseitig kalibriert für den sofortigen Einsatz, keine zusätzliche Kalibrierung erforderlich.
- Generalisierbare Erfassung: Aufgaben werden unter verschiedenen Objekt-, Umgebungs- und Lichtbedingungen wiederholt.
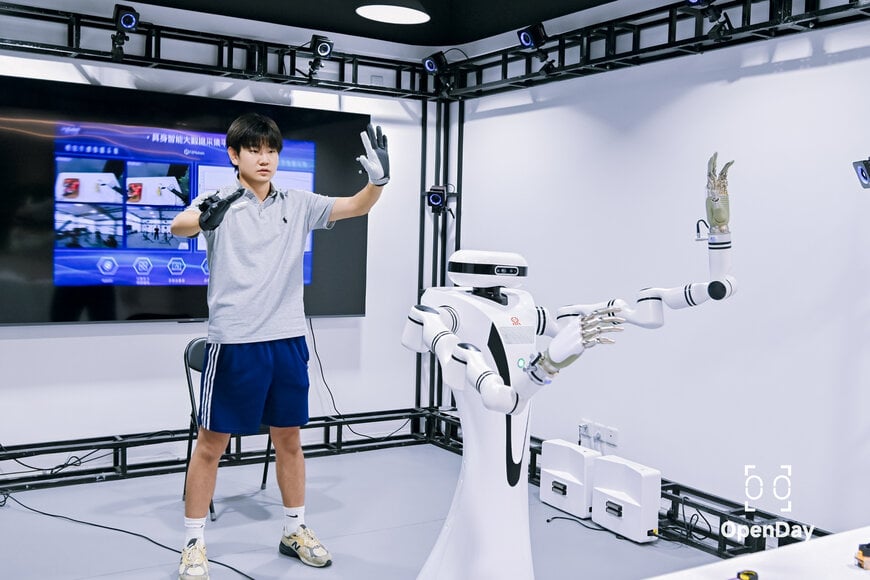
- Exoskelett-Fernsteuerung: 1:1-Bewegungsabbildung von Mensch zu Roboter ermöglichen eine hochpräzise Darstellung.
Hochleistungsfähige Datenerfassungsplattformen
Die Roboterarme von RealMan entsprechen den Proportionen eines erwachsenen menschlichen Arms entsprechen, und sie lassen nahtlos in reale Aufgaben integrieren:
Nutzlast: 5 kg Nennlast, maximal 9 kg
TCP-Geschwindigkeit: 1,8 m/s
Leistungsaufnahme: <100 W
MTBF: 50.000 Stunden
Für die Datenerfassung verwendete Robotertypen:
RS-01: ein mobiler Roboter mit Rädern und Klappmechanismus, 20-DOF-Arm, multimodale Sicht.
RS-02: ein zweiarmer Roboter für hebe-Aufgaben, RGB plus Tiefenwahrnehmung, zwei 7-DOF-Arme mit je 9 kg Nutzlast, sechsachsige Kraftsensorik + Overhead-Fisheye-Bildgebung.
RS-03: ein zweiarmer Präzisionsroboter mit einem leistungsfähigen Binokular-System für hochauflösende Stereosicht und präziser Manipulation.

Alle drei Roboter verfügen über Handgelenk- und Kopfkameras mit großem Sichtfeld (H 90° / V 65°) und vollständiger zeitlich-räumlicher Synchronisation. Sie stellen eine mächtige Robotikplattform dar, die sich für die industrielle Automatisierung, für Einsätze im Privathaushalt und für die wissenschaftliche Forschung eignet. Entsprechend vielfältig sind die mit ihnen generierten Datensätze.
Auf dem Weg zu einem globalen Open-Source-Robotik-Ökosystem
Mit der Veröffentlichung von RealSource als Open Source-Datensatz zielt RealMan Robotics darauf ab, Datensilos aufzubrechen und die Forschung im Bereich der KI-gestützten Robotersteuerung voranzutreiben. Das Unternehmen plant, den Datensatz weiter auszubauen, neue Szenarien und Modi hinzuzufügen und ein vollständig offenes, vernetztes Ökosystem aufzubauen, das eine Brücke zwischen Forschung und industrieller Anwendung schlägt.
Fordern Sie weitere Informationen an…
